Sidang Progress Tugas Akhir ini menampilkan 3 karya Tugas Akhir, yaitu:
- Rancang Bangun Pakan Udang Otomatis Menggunakan Multi Sensor Berat Hx711 Berbasis Mikrokontroler
Cara
kerja alat ini yaitu, pakan udang dimasukkan kedalam gentong, kemudian saat
sudah memasuki jadwal jam makan, maka servo pertama akan membuka pintu,
sehingga pakan dapat sampai pada pembacaan berat oleh sensor berat. Selanjutnya
ketika sensor membaca berat pakan dari rata-rata hasil pembacaan kedua sensor,
maka sensor servo kedua dan ketiga akan membuka pintu menuju tempat pelontar
pakan. Setelah itu pakan akan dilontarkan oleh motor AC dengan kecepatan yang
telah ditentukan. Pada alat ini juga terdapat kekurangan yaitu pada bagian
kalibrasi kedua sensor berat pada saat disatukan dengan alat pakan udang
otomatis hasilnya masih kurang akurat, sehingga pakan yang masuk dan keluar
berbeda.

2. Penerapan
Multi Kamera Pada Sistem Keamanan Tambak Pakan Udang Otomatis Berbasis Internet
of Things
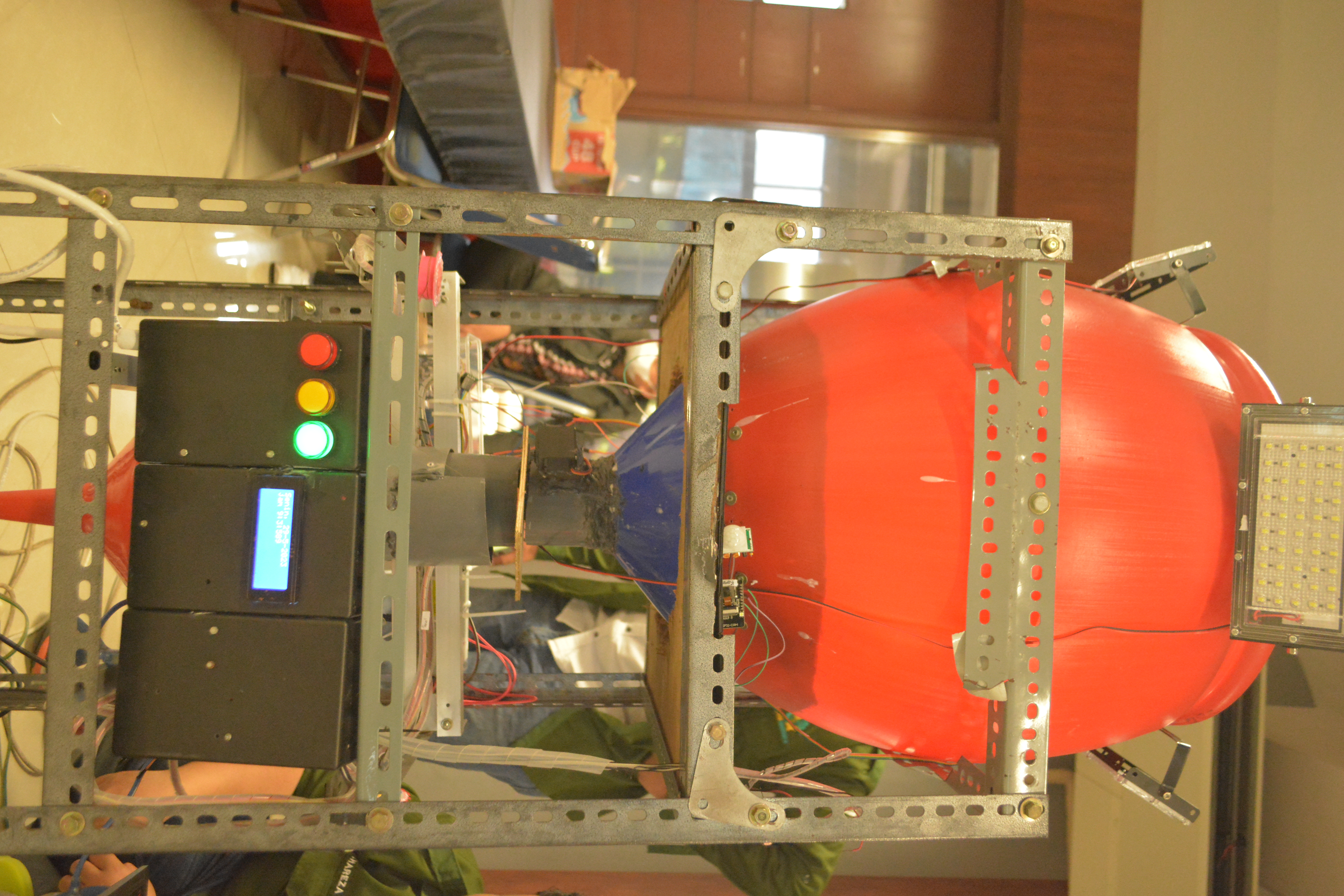
Pada alat ini, sensor PIR berfungsi untuk mendeteksi sebuah gerakan yang ada didepannya, lalu ESP32-CAM berfungsi sebagai pengambil gambar dari hasil deteksi oleh sensor PIR, dan lampu sorot berfungsi untuk membantu pencahayaan pengambilan gambar pada kamera ESP32-CAM. Adapun sensor Ultrasonik HC-SR04 berfungsi sebagai pendeteksi sisa makanan pada penampung pakan. Dari hasil deteksi sensor PIR jika ada gerakan akan mengirimkan sinyal ke WEMOS D1, lalu diteruskan ke ESP32-CAM untuk mengambil gambar disertai lampu sorot menyala, yang pada akhirnya gambar akan dikirimkan melalui Telegram. Alat ini juga bisa memantau sisa makanan di dalam penampung pakan melalui Telegram dengan menginputkan sebuah pesan, lalu pesan tersebut akan diterima oleh WEMOS. Setelah diterima pesan tersebut WEMOS akan mengirimkan pesan sisa makanan ke Telegram. Kekurangan pada pengembangan alat ini adalah diperlukannya perbaikan pada kabel dan port pin yang kurang rapi, sehingga beberapa sensor kurang berfungsi maksimal. Lalu melakukan perbaikan pada pengiriman Telegram yang telat. WEMOS D1 yang dipakai kurang stabil karena banyaknya sensor yang terhubung dan terkadang WEMOS D1 mereset otomatis, sehingga memungkinkan untuk diganti.

