Sidang Progress Tugas Akhir ini menampilkan 3 karya Tugas Akhir, yaitu:
SISTEM KONTROL PENGGERAK MOBILE ROBOT MENGGUNAKAN PERINTAH SUARA BERBASIS AUDIO CLASSIFICATION PADA DEEP LEARNING

Alat ini memiliki tiga bagian, bagian pertama telepon pintar sebagai mikropon untuk menerima perintah suara, bagian kedua laptop yang digunakan untuk AI dalam menganalisa serta memprediksi perintah suara yang diberikan dengan metode MFCC dan bagian ketiga berupa ESP32 yang menerima prediksi kemudian menggerakkan robot sesuai arah perintah suara. Semua komunikasi yang dilakukan pada telepon pintar, laptop dan ESP32 pada robot menggunakan komunikasi Wifi UDP. Manfaat alat ini membawa banyak manfaat, mulai dari peningkatan aksesibilitas dan kenyamanan hingga peningkatan produktivitas dan efisiensi di berbagai bidang. Dengan kemajuan teknologi pengenalan suara, potensi penerapannya semakin luas dan inovatif.
SISTEM
MONITORING DAN PENGENDALIAN PEMBERI PAKAN AYAM PEDAGING OTOMATIS MENGGUNAKAN
MAGGOT YANG TERINTEGERASI OLEH IOT

Tugas
Akhir ini berfokus pada pengembangan dan implementasi "Sistem Monitoring
dan Pengendalian Pemberi Pakan Ayam Pedaging Otomatis Menggunakan Maggot yang
Terintitegerasi oleh IoT". Sistem ini dirancang untuk memudahkan peternak
dalam memberikan pakan secara efisien dan tepat waktu, sehingga mengurangi
beban kerja manual dan meningkatkan produktivitas peternakan. Dengan
menggunakan mikrokontroler, sensor berat, dan servo motor, sistem ini mampu
mengatur distribusi pakan berdasarkan jumlah ayam dan jenis pakan yang telah
ditentukan. Komponen utama meliputi wadah pakan dengan sensor berat, servo
motor yang mengontrol buka tutup wadah pakan, serta modul WiFi untuk
konektivitas IoT. Terhubung ke aplikasi Blynk, sistem ini memungkinkan
pemantauan dan kontrol jarak jauh melalui smartphone, sehingga peternak dapat
mengatur jadwal pemberian pakan, memantau konsumsi pakan secara real-tim. Dengan
adanya sistem ini, pemberian pakan menjadi lebih presisi dan konsisten,
memberikan solusi praktis dan efisien bagi peternak.
Salah
satu kekurangan yang dihadapi adalah pada penggunaan akrilik sebagai wadah
sensor berat yang kurang kokoh. Ketika diuji selama sidang progres, akrilik
tersebut patah karena tidak mampu menahan beban dengan baik. Pada tahap
selanjutnya, akan mengganti akrilik yang patah dengan yang lebih tebal dan
kokoh agar sistem dapat bekerja dengan lebih stabil dan dapat diandalkan. Selain
itu, pengaturan derajat buka tutup servo motor untuk pakan. Disarankan agar
derajat servo disesuaikan dengan jenis pakan yang diberikan, sehingga
distribusi pakan bisa lebih tepat dan efisien. Untuk servo pakan pur dan
maggot, penyesuaian derajat akan diterapkan guna memastikan pakan dapat
disalurkan dengan jumlah yang sesuai dan tidak terjadi pemborosan. Masukan ini
akan menjadi acuan penting dalam perbaikan dan pengembangan lebih lanjut dari sistem
pemberian pakan ayam otomatis.
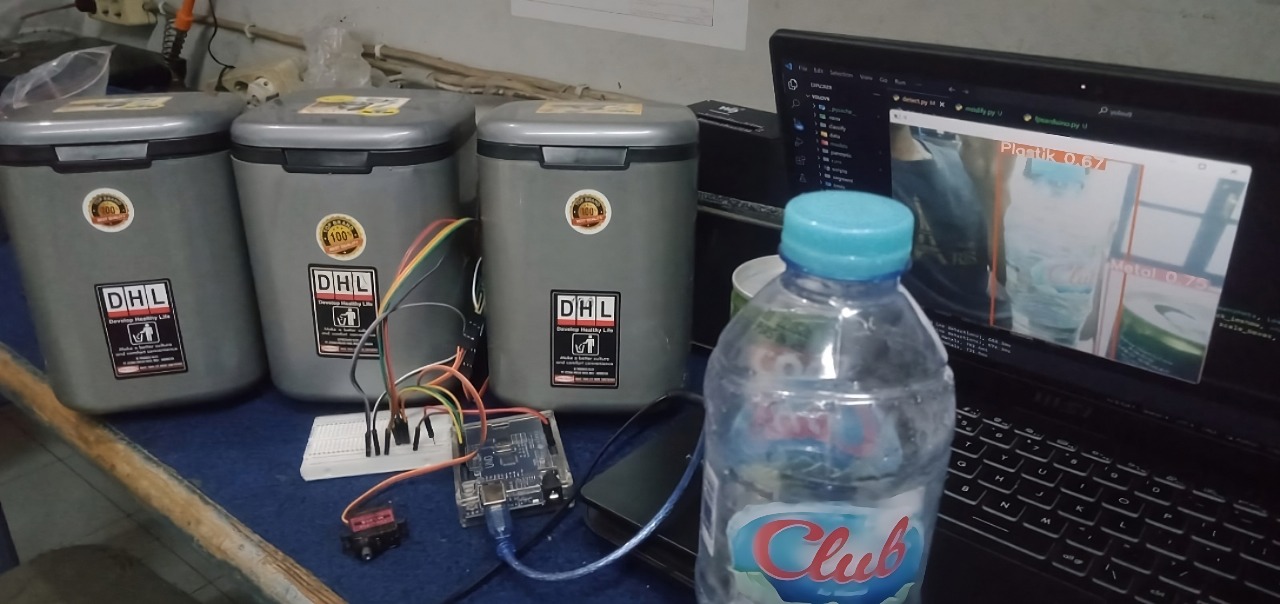
RANCANG BANGUN SISTEM PEMILAH SAMPAH SECARA OTOMATIS BERBASIS VISI KOMPUTER MENGGUNAKAN YOLO VERSI 5.0
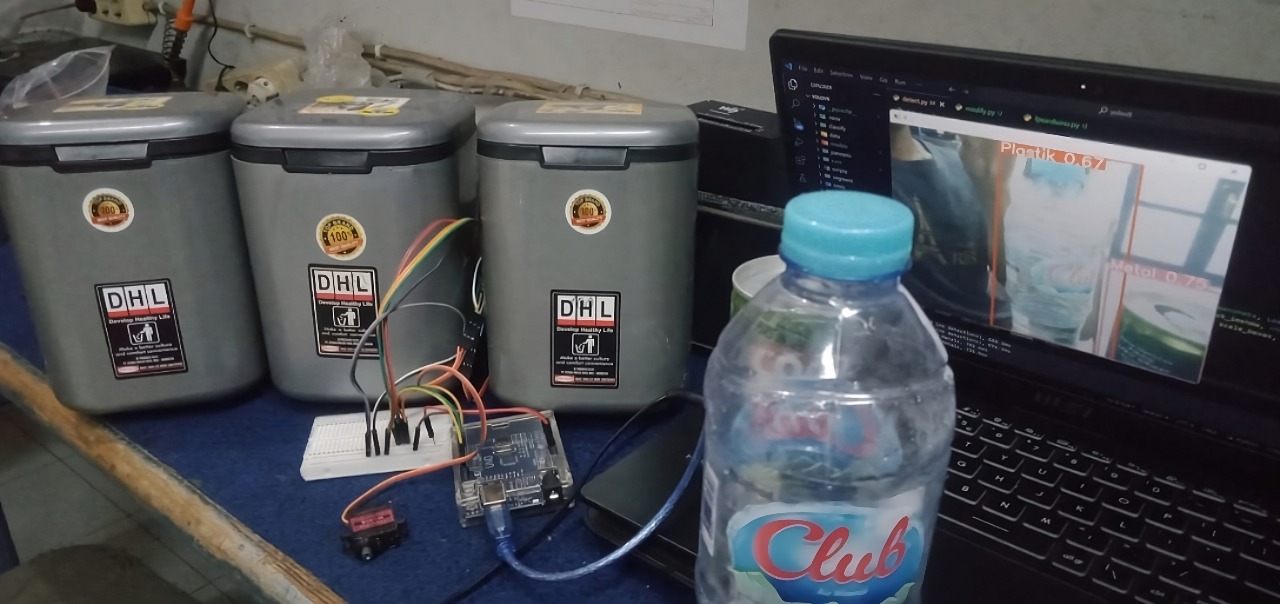
YOLO
atau "You Only Look Once," adalah salah satu algoritma deteksi objek
yang terkenal dalam bidang computer vision dan deep learning. Algoritma ini dirancang
untuk mendeteksi dan mengklasifikasikan objek dalam gambar atau video secara
real-time. Rancang bangun sistem pemilah sampah dengan menggunakan metode YOLO,
menggunakan webcam dengan bantuan opencv. Objek sampah yang diambil untuk
proses pendeteksian dibedakan menjadi tiga jenis sampah berdasarkan bentuk
sampah tersebut yakni kertas berbentuk persegi atau persegi Panjang, plastic
berbentuk botol, dan metal berbentuk kaleng minuman bersoda.
